Dépolluer de l’eau contaminée avec des robots microscopiques ?
Posté : 15 septembre 2020 / Mis-à-jour : 22 novembre 2025
Temps de lecture : 7 minutes

La qualité de l’eau est un enjeu écologique important. De part son utilisation pour les activités humaines et industrielles, elle peut être polluée par de nombreuses substances telles que des éléments traces métalliques (métaux lourds), des hydrocarbures, des produits chimiques de synthèse, des résidus de produits pharmaceutiques, des matières radioactives mais aussi par des bactéries. La pollution de l’eau conduit à une diminution des ressources en eau potable ainsi qu’à des normes de rejets de plus en plus strictes. Ce phénomène risque de s’accentuer avec l’augmentation des activités humaines et industrielles.
L’eau est traditionnellement dépolluée dans des stations d’épuration par une combinaison de méthodes physico-chimiques et biologiques. Des scientifiques travaillent sur des alternatives à ces techniques, telle que la dépollution de l’eau par des micro-robots [1].
Robots microscopiques
Les films et livres de science-fiction font souvent intervenir des robots microscopiques dans leurs intrigues. Ces robots sont composés d’ordinateurs sur-puissants et d’instruments électroniques de pointe. Les robots actuellement développés par des scientifiques sont loin de cette image futuriste. Il ne s’agit pas d’ordinateurs miniaturisés mais plutôt d’ « automates » capables d’exécuter des actions.
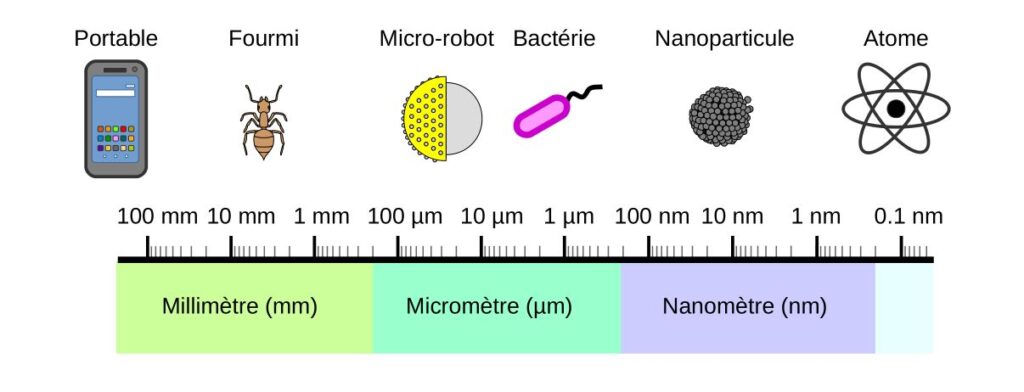
Les micro-robots (aussi appelés micro-machines) sont des appareils mobiles dont les dimensions sont de l’ordre du micromètre [1]. Derrière cette définition se cache une grande diversité d’appareils. Ceux-ci peuvent être dits synthétiques lorsqu’ils sont composés de métaux ou de polymères. Il existe aussi des robots hybrides qui sont un mélange de parties biologiques et synthétiques (par exemple en « greffant » des parties synthétiques sur une cellule telle qu’un spermatozoïde [2]).
La mobilité est une caractéristique importante des micro-robots. Elle peut être apportée par un constituant interne (réaction chimique) ou externe (champ magnétique) [3]. La petite taille de ces robots permet l’accès dans des conduits de taille microscopique. Par exemple dans le corps humain, où ils peuvent servir à transporter de façon précise des médicaments [4].
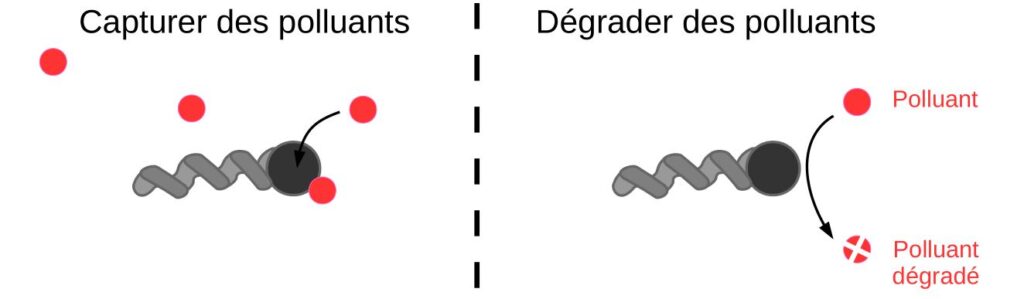
Ces micro-robots peuvent être utilisés pour éliminer des polluants dans l’environnement. L’un des mécanismes employés consiste à attraper les polluants via un mécanisme appelé l’adsorption. Les polluants sont alors fixés à la surface du micro-robots. Il suffit ensuite de récupérer les micro-robots avec les polluants pour dépolluer le milieu. Un autre mécanisme consiste à dégrader directement le polluant dans l’environnement.
La détection de polluants est une autre mission pouvant être accomplie par ces micro-robots. Dans ce cas, le robot dispose d’un composant permettant la production d’un signal (par exemple lumineux) lorsqu’il détecte un polluant.
Description du micro-robot Janus
Des équipes de recherche d’Espagne et d’Allemagne ont développé un micro-robot dans le but d’éliminer les bactéries présentes dans l’eau. Ce micro-robot est basé sur un modèle de nanoparticules appelé Janus, qui correspond à une sphère dont chaque moitié possède une surface avec des propriétés différentes [5]. Le nom Janus provient du dieu romain des commerçants et des portes qui est généralement représenté par deux faces opposées.
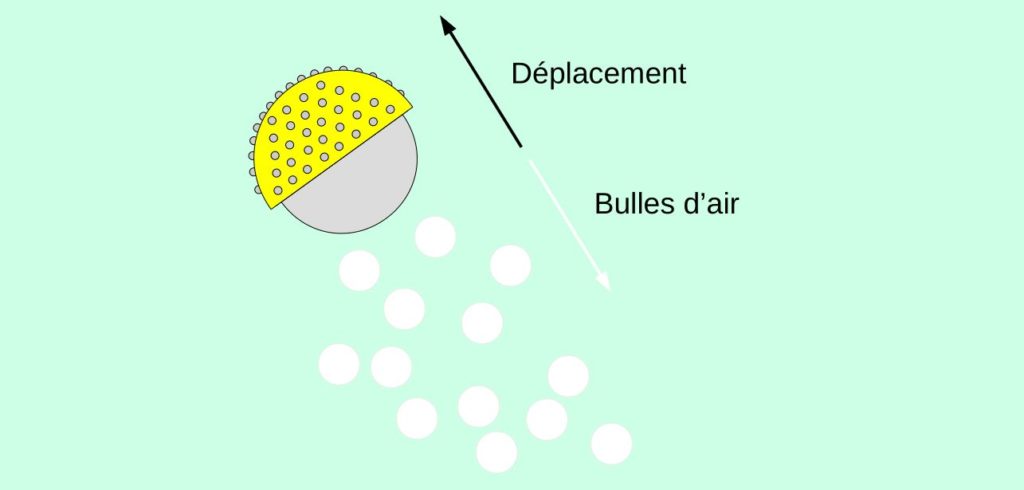
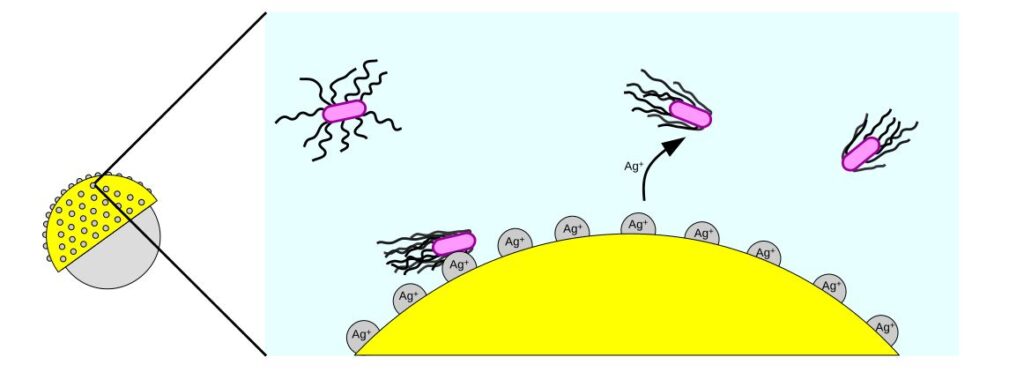
Le micro-robot, développé dans cette étude, est basé sur une sphère de magnésium d’un diamètre de 15 µm (soit 0,015 mm). À titre de comparaison, la taille d’une bactérie est en général 15 fois plus petite (1 µm). Sur l’une des moitiés de cette sphère, une couche de fer est ajoutée pour ses propriétés magnétiques. Cette couche de fer est ensuite recouverte d’or qui sert de support pour des nanoparticules d’argent.
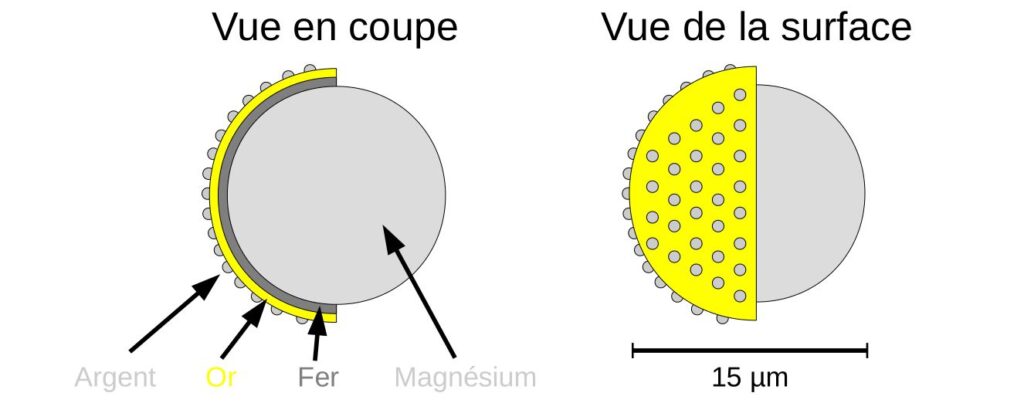
La sphère de magnésium sert de support au micro-robot mais aussi de carburant. En effet, au contact de l’eau, le magnésium se trouvant à la surface de la nanoparticule va réagir dans une réaction chimique et former de microbulles de gaz (H2). Ces microbulles vont pousser le micro-robot et permettre ainsi un déplacement autonome.
Mg (solide) + 2 H2O (liquide) -> Mg2+ (liquide) + 2 OH– (liquide) + H2 (gaz)
Nanoparticules d’argent, une arme anti-bactéries
Les nanoparticules d’argent (symbole chimique Ag) présentes sur ce micro-robot ont été choisies car elles sont couramment utilisées en médecine pour leur propriétés anti-bactériennes [6]. Ces nanoparticules libèrent des ions Ag+ directement au niveau de la surface des bactéries. Ces ions sont néfastes pour les bactéries car ils induisent la formation d’espèces réactives de l’oxygène (toxiques) et parce qu’ils peuvent se fixer sur les protéines présentes à la surfaces des bactéries.
Résultats de l’étude : le micro-robot se déplace-t-il ?
Avant de tester son efficacité vis-à-vis des bactéries, les capacités de déplacement du micro-robot sont étudiées. Une caméra couplée à un microscope permet de filmer les micro-robots dans l’eau. Premièrement, la durée de nage des micro-robots est déterminée. La vitesse maximale observée est de 27 µm/s. La durée de nage dépend de la quantité de magnésium contenue par le micro-robot. Elle est de 15 minutes dans les conditions choisies.

Une fois l’expérience finie, les concentrations d’argent, de magnésium et de fer dans l’eau sont étudiées. En effet, le but de ces micro-robots est de dépolluer l’eau et non pas d’ajouter de nouveaux polluants. Les concentrations détectées sont inférieures à celles conseillées par l’organisation mondiale de la santé pour l’eau potable. L’utilisation de ces micro-robots ne présenterait donc pas de problèmes.
Quel est l’effet des micro-robots sur les bactéries ?
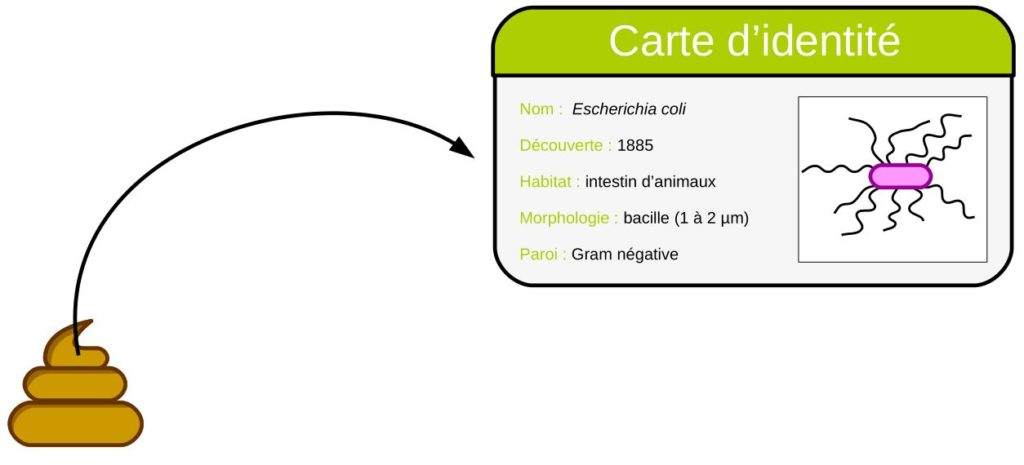
L’effet bactéricide du robot est ensuite étudié vis-à-vis de la bactérie Escherichia coli MG1655, organisme modèle en laboratoire mais qui est aussi utilisé comme indicateur de contamination fécale [7 ; 8].
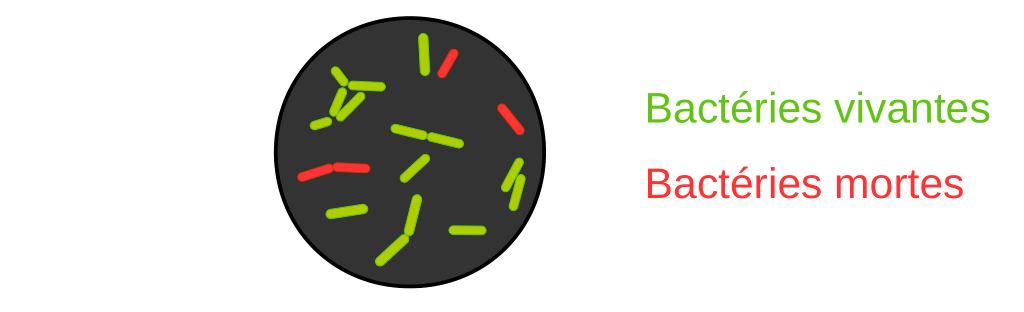
Pour observer l’effet des micro-robots sur les bactéries, des colorants sont utilisés pour différencier les bactéries vivantes ou mortes par microscopie [9]. Les bactéries vivantes et mortes sont colorées respectivement en vert et en rouge (dead / alive). Une fois colorées, il suffit de compter les bactéries. Cette méthode a permis d’estimer que le micro-robot élimine plus de 80 % des bactéries. Une expérience témoin est réalisée en utilisant uniquement des nanoparticules d’argent et en absence de micro-robot. Dans ce cas, seulement 20 à 30 % des bactéries sont éliminées. Placer les nanoparticules d’argent sur le micro-robot permet donc d’augmenter leur efficacité. Cela peut être expliqué par le mouvement des robots qui favorise la rencontre avec les bactéries et augmente aussi la libération d’ions argent.
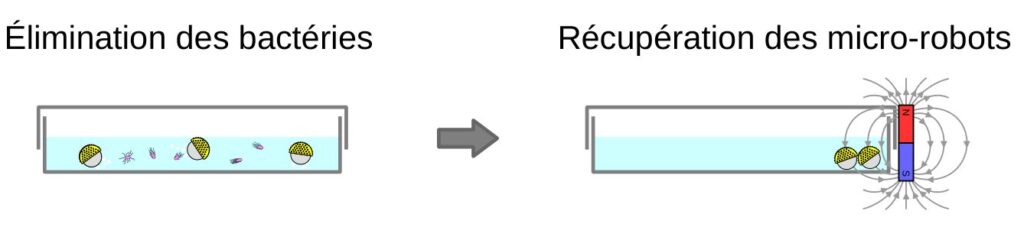
Récupérer les micro-robots après utilisation
Une fois les bactéries éliminées, les micro-robots peuvent être récupérés. La couche de fer présente dans le robot permet cette récupération (avec les bactéries fixées à sa surface) en utilisant un champ magnétique.
Perspectives de l’étude
Cette méthode est une nouvelle alternative aux techniques traditionnelles de traitements des eaux usées. Elle ne forme pas de sous-produits dangereux et facilite l’accès à des espaces de faible taille.
Référence de l’étude
Vilela, D., Stanton, M. M., Parmar, J., & Sánchez, S. (2017). Microbots decorated with silver nanoparticles kill bacteria in aqueous media. ACS Applied Materials & Interfaces, 9(27), 22093–22100. doi:10.1021/acsami.7b03006 (lien)
Pour plus d’informations
[1] Ying, Y., & Pumera, M. (2018). Micro/Nanomotors for water purification. Chemistry – A European Journal. doi:10.1002/chem.201804189 (lien)
[2] Alapan, Y., Yasa, O., Yigit, B., Yasa, I. C., Erkoc, P., & Sitti, M. (2018). Microrobotics and microorganisms: Biohybrid autonomous cellular robots. Annual Review of Control, Robotics, and Autonomous Systems, 2(1). doi:10.1146/annurev-control-053018-023803 (lien)
[3] Mushtaq, F., Asani, A., Hoop, M., Chen, X.-Z., Ahmed, D., Nelson, B. J., & Pané, S. (2016). Highly efficient coaxial TiO2-PtPd tubular nanomachines for photocatalytic water purification with multiple locomotion strategies. Advanced Functional Materials, 26(38), 6995–7002. doi:10.1002/adfm.201602315 (lien)
[4] Sitti, M., Ceylan, H., Hu, W., Giltinan, J., Turan, M., Yim, S., & Diller, E. (2015). Biomedical applications of untethered mobile milli/microrobots. Proceedings of the IEEE, 103(2), 205–224. doi:10.1109/jproc.2014.2385105 (lien)
[5] Lattuada, M., & Hatton, T. A. (2011). Synthesis, properties and applications of Janus nanoparticles. Nano Today, 6(3), 286–308. doi:10.1016/j.nantod.2011.04.008 (lien)
[6] Sánchez-López E, Gomes D, Esteruelas G, et al. Metal-based nanoparticles as antimicrobial agents: An overview. Nanomaterials (Basel). 2020;10(2):292. Published 2020 Feb 9. doi:10.3390/nano10020292 (lien)
[7] Daegelen, P., Studier, F. W., Lenski, R. E., Cure, S., & Kim, J. F. (2009). Tracing ancestors and relatives of Escherichia coli B, and the derivation of B strains REL606 and BL21(DE3). Journal of Molecular Biology, 394(4), 634–643. (lien)
[8] Korajkic, A., Wanjugi, P., Brooks, L., Cao, Y., & Harwood, V. J. (2019). Persistence and decay of fecal microbiota in aquatic habitats. Microbiology and Molecular Biology Reviews, 83(4). (lien)
[9] Stiefel, P., Schmidt-Emrich, S., Maniura-Weber, K., & Ren, Q. (2015) Critical aspects of using bacterial cell viability assays with the fluorophores SYTO9 and propidium iodide. BMC Microbiol. ; 15:36. doi:10.1186/s12866-015-0376-x (lien)
Partager via









Aucun commentaire